超音波振動や機能性流体を利用したアクチュエータ技術を基盤として、こうした技術の強みを生かしたアプリケーションを研究しています。たとえば、細胞工学や医療に貢献する細胞培養システムや感覚情報を取り扱うための触力覚センサ・ディスプレイシステム、人との協調などに求められるソフトロボットなどを開発しています。応用分野は多岐に渡りますが、いずれも生物や人との関わりを持った機械システムの研究に取り組んでいます。
超音波振動を用いた細胞培養システム
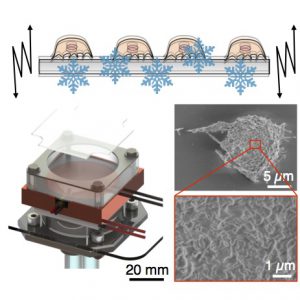
近年、培養細胞を用いた再生医療や創薬研究などが盛んに行われています。疾患部の再生を目指す再生医療は重症患者の回復を可能としますし、培養細胞を用いてチップ上に再現した臓器を使えば動物実験の代わりに新薬の開発に利用できます。しかし、こうした医療や研究の普及には大量の培養細胞が必要で手作業による培養には限界があります。そこで、我々は超音波技術を駆使して面倒な細胞培養プロセスの完全自動化を目指すとともに、培養細胞の均質化にも貢献します。
酵素フリーによって細胞活性の低下を防ぐ細胞剥離技術

単細胞のみを回収する超音波ポンピングシステム
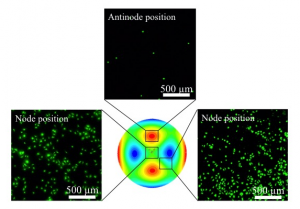
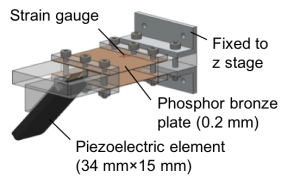
培養基材の固有振動モードに応じた細胞パターニング
ヒトの触知覚特性に基づいた触感センシングシステム
触覚は他の感覚と同様に、私たちが周囲の環境を知るための大切な感覚です。脳の体性感覚野では指先などから送られてくる情報を適切に処理して触感を知覚しています。「ツルツル」「冷たい」「高級」など非常に多くの単語で表現される触感を工学的に利用するために、指先などに存在する触覚受容器の特性を機械工学的に理解して、触感を定量的に測定する触感センシングシステムを開発しています。
触覚受容器が反応する振動刺激の閾値を用いた各受容器の発火状態の推定
ソフトロボット
家庭内などで人とロボットが協調する日が近づいています。また、医療の現場では臓器を優しく扱うロボットが使われるかもしれません。こうしたロボットにはコンパクトで柔らかいシステムの実現が求められます。このため、機能性流体を用いて、コンパクトな圧力源によって駆動される柔軟なソフトロボットを開発しています。
圧力源を内蔵した柔軟生物型ロボット

7自由度を有するフレキシブルハンド
ポンプを内蔵した液滴駆動型μTAS
μTAS(micro Total Analysis System)は生化学分析のためのオンチップ分析システムです。チップ上でサンプルや試薬を液滴状で扱うことができれば、サンプルや試薬の量を劇的に低減できるだけでなく分析時間の短縮も可能です。場所を選ばずにこうしたシステムを利用可能とするには真にチップ化されたシステムが必要ですが、液滴の駆動源をチップに内蔵することは容易ではありません。こうした課題に対して、機能性流体を利用した液滴の生成や位置制御の技術を開発しています。
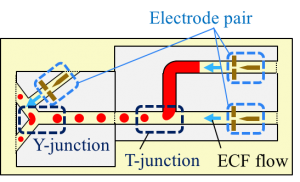
チップ上での液滴の生成
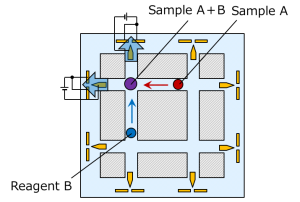
流路内での複数液滴の位置制御